|
I am a third year Ph.D student in i-VisionGroup in the Department of Automation, Tsinghua University, advised by Prof. Jiwen Lu . In 2023, I received my BS degree from the Department of Automation, Tsinghua University. I am interested in computer vision and deep learning. My current research focuses on autonomous driving and vision foundation models. |

|
|
|
|
*Equal contribution †Project leader. |
|
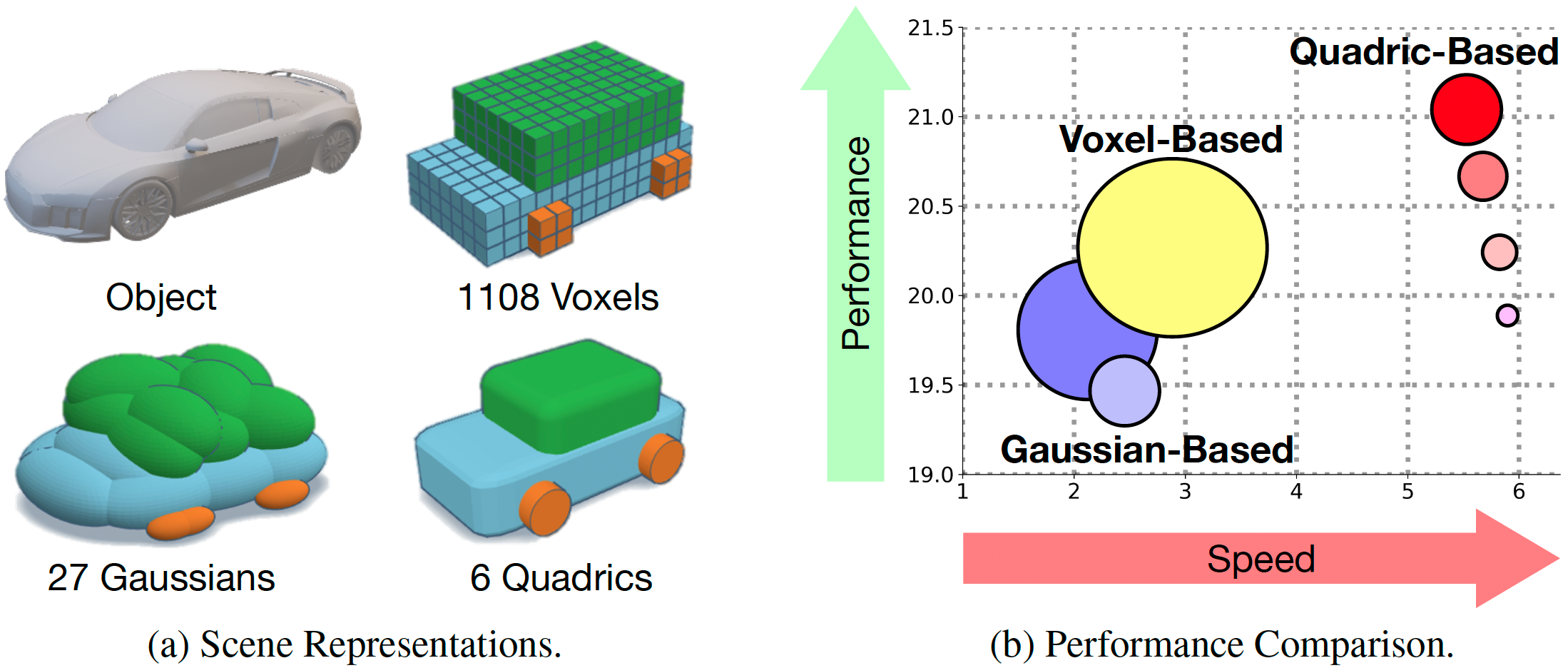
Sicheng Zuo* , Wenzhao Zheng*† , Xiaoyong Han* , Longchao Yang, Yong Pan, Jiwen Lu The Thirty-Ninth Annual Conference on Neural Information Processing Systems (NeurIPS), 2025. [arXiv] [Code] [Project Page] QuadricFormer proposes geometrically expressive superquadrics as scene primitives, enabling efficient and powerful object-centric representation of driving scenes. |
|
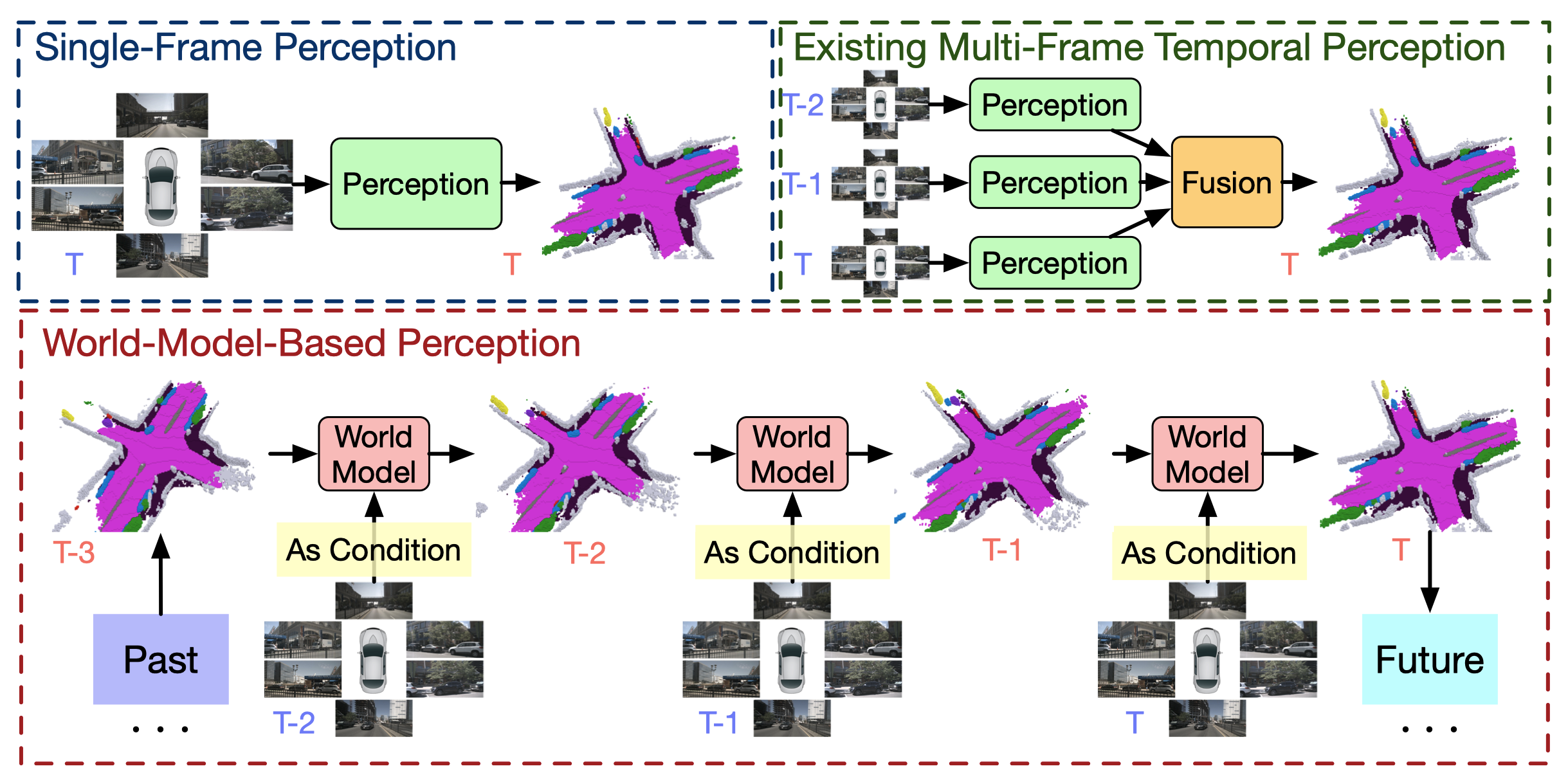
Sicheng Zuo* , Wenzhao Zheng*† , Yuanhui Huang , Jie Zhou , Jiwen Lu IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025. [arXiv] [Code] GaussianWorld reformulates 3D occupancy prediction as a 4D occupancy forecasting problem conditioned on the current sensor input and proposes a Gaussian World Model to exploit the scene evolution for perception. |
|
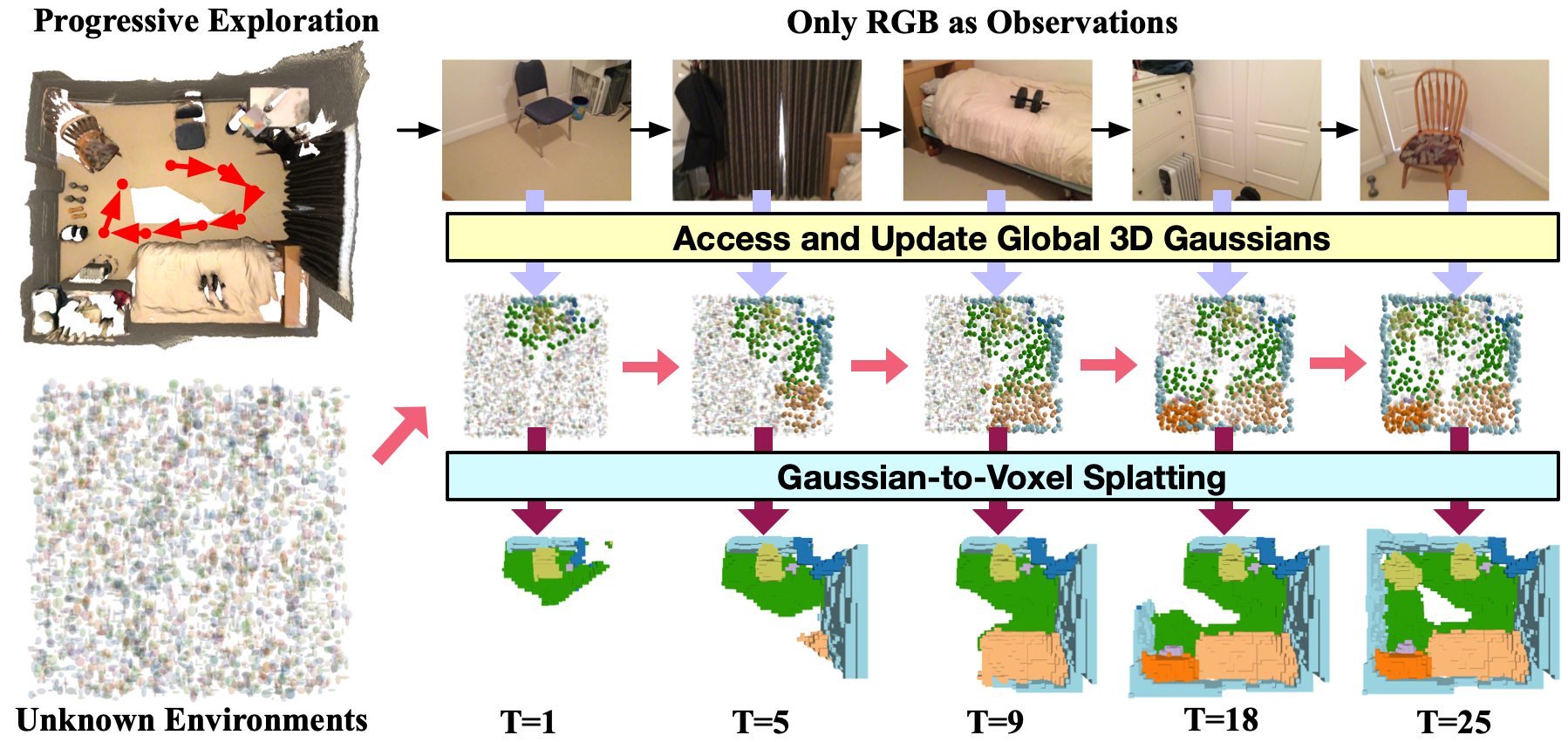
Yuqi Wu*, Wenzhao Zheng*† , Sicheng Zuo , Yuanhui Huang , Jie Zhou , Jiwen Lu IEEE International Conference on Computer Vision (ICCV), 2025. [arXiv] [Code] [Project Page] EmbodiedOcc formulates an embodied 3D occupancy prediction task and employs a Gaussian-based framework to accomplish it. |
|
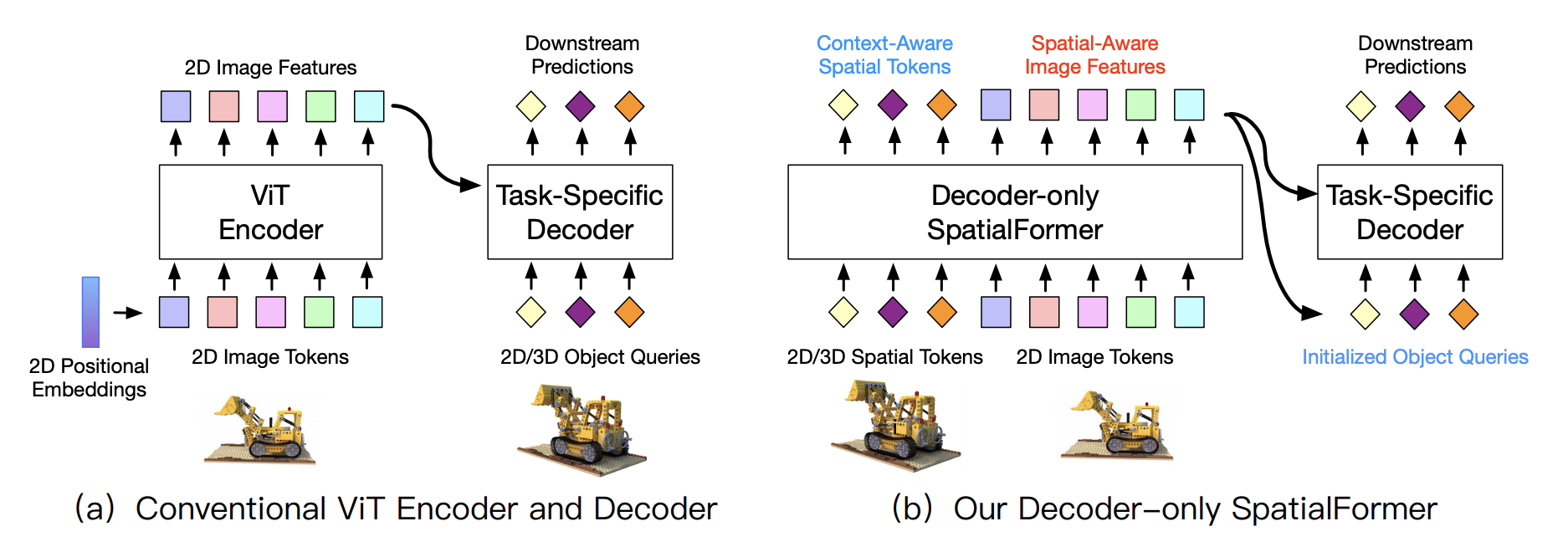
Han Xiao* , Wenzhao Zheng* , Sicheng Zuo , Peng Gao, Jie Zhou , Jiwen Lu European Conference on Computer Vision (ECCV), 2024. [Paper] SpatialFormer proposes an efficient vision transformer architecture with explicit spatial understanding for generalizable image representation learning. |

|
Sicheng Zuo* , Wenzhao Zheng* , Yuanhui Huang , Jie Zhou , Jiwen Lu arXiv, 2023. [arXiv] [Code] [中文解读 (in Chinese)] As the first 2D-projection-based method on the 3D semantic occupancy prediction task, PointOcc significantly outperforms all other methods by a large margin with a much faster speed. |
|
|
© Sicheng Zuo | Last updated: October 8, 2025.